Arjun Menon
Mechanical Engineer
Projects
TRACKER-AUTOMATED INVENTORY MANAGEMENT
The World’s Smartest Toolbox
Awarded 1st Place – Embry-Riddle Senior Design Showcase
Misplaced tools in aviation cost lives and millions in lost productivity. Tracker is an automated inventory ecosystem designed to solve tool accountability through hardware-software integration.
Our team developed a "smart" toolbox featuring real-time sensor tracking, a dedicated cloud dashboard for remote monitoring, and Gemini AI integration for intelligent troubleshooting. By automating the inventory process, we eliminated human error and streamlined maintenance workflows. The project was recognized as the top-performing engineering design at Embry-Riddle, winning 1st Place for its innovation in industrial safety and efficiency.

DYNAMIC TRACTION CONTROL – NORMAL FORCE ESTIMATION
Real-Time Vehicle Load Tracking via Frugal Sensor Design
Developing dynamic load monitoring for off-road vehicle optimization
Measuring dynamic weight distribution on a moving vehicle is critical for traction control but incredibly difficult. Our team engineered a dynamic normal force estimation system for a John Deere Gator 4x4 by mapping real-time suspension deflection into dynamic wheel loads while in motion.
To bypass the extreme cost of industrial sensors and the poor reliability of cheap alternatives, I designed and fabricated custom, rugged string potentiometers from scratch. By coupling a lawnmower pull-starter recoil mechanism with a 12-bit rotary encoder inside a custom 3D-printed enclosure, I delivered a highly precise, low-cost sensor. I then designed non-invasive clamp-on brackets to mount these sensors directly to the suspension, preserving the structural integrity of the chassis without drilling a single hole and enabling successful off-road testing.
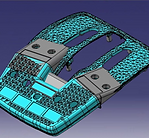
ECOCAR CADILLAC LYRIQ CENTER CONSOLE
Reverse-Engineered UI Integration via Sustainable Bio-Resin Prototyping
Redesigning the upper dashboard panel to integrate critical driver controls within tight OEM packaging constraints.
To integrate custom vehicle controls (including cab, cruise, and V2C systems) into the Cadillac Lyriq for the EcoCar competition, I redesigned the upper center console to house pre-sourced switches and LEDs within highly restricted space constraints. I 3D scanned the original OEM panel to reverse engineer its geometry, performing complex STL and mesh modifications to ensure flawless package engineering and wire routing without obstructing the driver's line of sight.
Through seven iterations of rapid prototyping, I finalized a sleek design that seamlessly matched the vehicle's premium aesthetic. The final component was printed using sustainable bio-resin, earning the team bonus sustainability points and outstanding remarks for design excellence in the competition.







JAGRITI YATRA
World's largest entrepreneurial journey
Selected from over 10,000 applicants for a global entrepreneurial journey, joining 500 participants on a 15-day train tour across India
Engaged in extensive networking and community-building activities while traveling through major Indian cities.
Participated in mega-events with esteemed G20 delegates, gaining insights from top global thought leaders.
Created popular YouTube shorts documenting the journey, achieving significant engagement among youth.
Facilitated over 100 networking opportunities, leading to valuable connections and expanded business insights.
MOTORCYCLE DYNAMICS
Instrumentation & traction control simulator
I undertook the development of a motorcycle traction control instrumentation project, with the aim of designing a platform that could take various inputs, including engine speed, rider weight, throttle input, lean angle, and motorcycle speed, to generate outputs such as engine speed, power, and torque. As a safety measure, I also integrated an ABS braking system into the design to ensure safe stopping in emergency situations. Through the successful execution of this project, I demonstrated proficiency in conceptualizing, designing, and implementing complex systems while adhering to safety standards.




.jpg)
PROJECT SPECTRE
Experimental rocket propulsion lab
I was instrumental in the development of the "SPECTRE" a model rocket project, which utilized active stabilization algorithms and canards to modify its trajectory. Using CAD, I designed the rocket, ran simulations to optimize its performance, and manufactured essential components. I also created a specialized module to house four servo motors and four canards, resulting in a maneuverable three-dimensional platform. My contributions and technical expertise were critical to the success of the Embry Riddle Rocketry Club (ERPL), where I was a key member.



NAUTILUS - THE ROBOSUB
Autonomous maritime robotics association
As a Designer for Mechanics and Structures with Team Unsinkable, I played a crucial role in the production of the "Nautilus" autonomous probe, which competed in several maritime robotics underwater challenges. I was responsible for manufacturing and testing underwater robots and submarines, ensuring their functionality and reliability. Additionally, I organized events on campus to promote the field of maritime robotics, which helped raise awareness and attract new members to the team.


